







Forum de mathématiques - Bibm@th.net
Vous n'êtes pas identifié(e).
- Contributions : Récentes | Sans réponse
Pages : 1
#1 Re : Entraide (supérieur) » matrice rot repère différent » 12-04-2022 14:36:33
En fait, je sais exprimer la matrice de rotation du repère (X0, Y0, Z0) vers (X2, Y2, Z2) en utilisant les angles alpha a et b. Par contre, comment j'exprime une rotation autour de X2 de l'angle theta qui appartient au plan Z0 O Y0.
#2 Entraide (supérieur) » matrice rot repère différent » 12-04-2022 13:43:44
- JoeJoe
- Réponses : 2
Bonjour, je souhaiterais exprimer la matrice de rotation Rx(theta) dans le repère 0, X2, Y2, Z2 sachant que theta est issue du plan Y0 O Z0.
Le passage repère entre 0, X0, Y0, Z0 et 0, X1, Y1, Z1 nécessite une rotation en Z0.
Le passage repère entre 0, X1, Y1, Z1 et 0, X2, Y2, Z2 nécessite une rotation en Y1.
Pouvez vous me décrire la démarche à suivre.
Merci.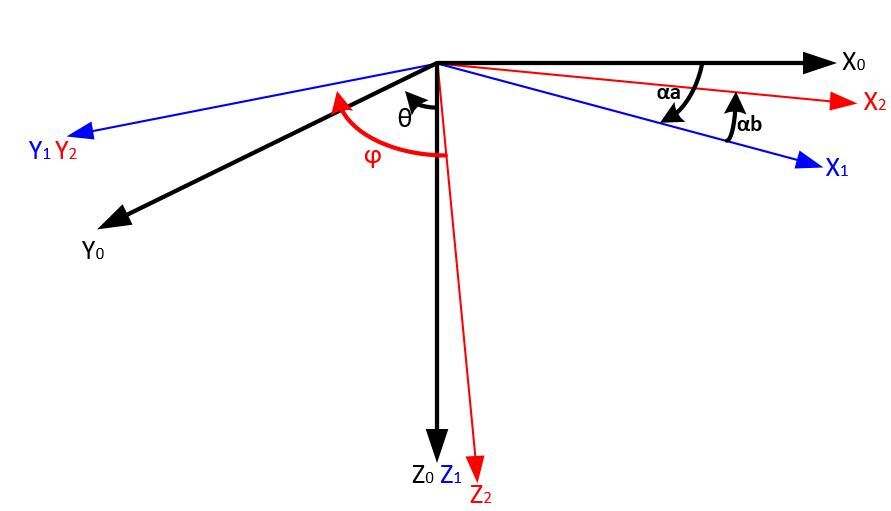
#3 Re : Entraide (supérieur) » Inverse matrice Sin Cos » 12-04-2022 12:11:01
Effectivement, je viens de re vérifier j'avais une erreur. La matrice est orthogonale.
Merci
#4 Re : Entraide (supérieur) » Inverse matrice Sin Cos » 11-04-2022 09:33:51
Bonjour Roro, je viens d'essayer P∗tP= I3 afin de vérifier si la matrice est orthogonale. Je n'ai pas tout vérifié mais en dehors de la diagonale des éléments de la matrice identité sont non nuls.
Donc pour moi la matrice n'est pas orthogonale.
#5 Entraide (supérieur) » Inverse matrice Sin Cos » 09-04-2022 17:07:27
- JoeJoe
- Réponses : 5
Bonjour à tous,
Je vous envoie ce message car je souhaiterais calculer la matrice inverse 3x3 ci-dessous :
⎡-sin(A)⋅sin(C) + cos(A)⋅cos(B)⋅cos(C) -sin(A)⋅cos(C) - sin(C)⋅cos(A)⋅cos(B) sin(B)⋅cos(A)⎥
⎢sin(A)⋅cos(B)⋅cos(C) + sin(C)⋅cos(A) -sin(A)⋅sin(C)⋅cos(B) +cos(A)⋅cos(C) sin(A)⋅sin(B)⎥
⎥-sin(B)⋅cos(C) sin(B)⋅sin(C) cos(B)⎥
Je ne connais que la méthode des cofacteurs et calculer le déterminant et la transposée avec cette matrice me semble très compliqué.
Pourriez vous me donner des astuces pour calculer plus aisément la matrice inverse.
Merci.
Pages : 1