Forum de mathématiques - Bibm@th.net
Vous n'êtes pas identifié(e).
- Contributions : Récentes | Sans réponse
- Accueil
- » Entraide (supérieur)
- » matrice rot repère différent
- » Répondre
Répondre
Résumé de la discussion (messages les plus récents en premier)
- JoeJoe
- 12-04-2022 14:36:33
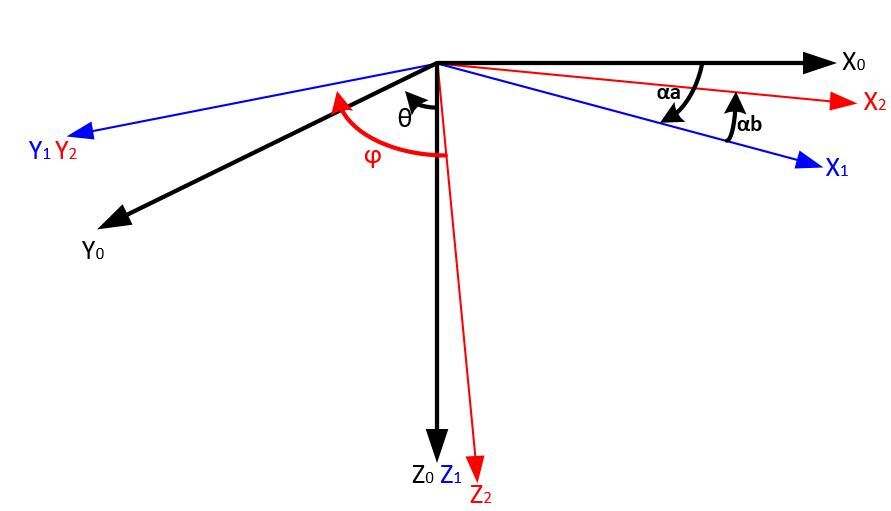
En fait, je sais exprimer la matrice de rotation du repère (X0, Y0, Z0) vers (X2, Y2, Z2) en utilisant les angles alpha a et b. Par contre, comment j'exprime une rotation autour de X2 de l'angle theta qui appartient au plan Z0 O Y0.
- Eust_4che
- 12-04-2022 14:18:09
Bonjour,
J'ai beaucoup de mal à comprendre la consigne et le dessin, mais j'ai l'impression qu'on demande d'exprimer la matrice de la rotation dans la base $(x_2, y_2, z_2)$. L'énoncé indiquant la forme de la matrice dans la base $(x_0, y_0, z_0)$ puis donnant la forme du passage de $(x_0, y_0, z_0)$ à $(x_1, y_1, z_1)$ et de $(x_1, y_1, z_1)$ à $(x_2, y_2, z_2)$, tu n'as plus qu'à en faire la composition.
E.
- JoeJoe
- 12-04-2022 13:43:44
Bonjour, je souhaiterais exprimer la matrice de rotation Rx(theta) dans le repère 0, X2, Y2, Z2 sachant que theta est issue du plan Y0 O Z0.
Le passage repère entre 0, X0, Y0, Z0 et 0, X1, Y1, Z1 nécessite une rotation en Z0.
Le passage repère entre 0, X1, Y1, Z1 et 0, X2, Y2, Z2 nécessite une rotation en Y1.
Pouvez vous me décrire la démarche à suivre.
Merci.